separate openrave independent part query_grasp #126
Conversation
|
@ipa-rmb @ipa-rmb-pz It might not be perfect yet, but it already shows a few issues (see the TODOs in the server) that might be the problem why MoveIt! is unable to find a plan for picking up the object:
Still, if you continue using this tools...it should be of significant help as you do not need to install OpenRAVE at all! |
|
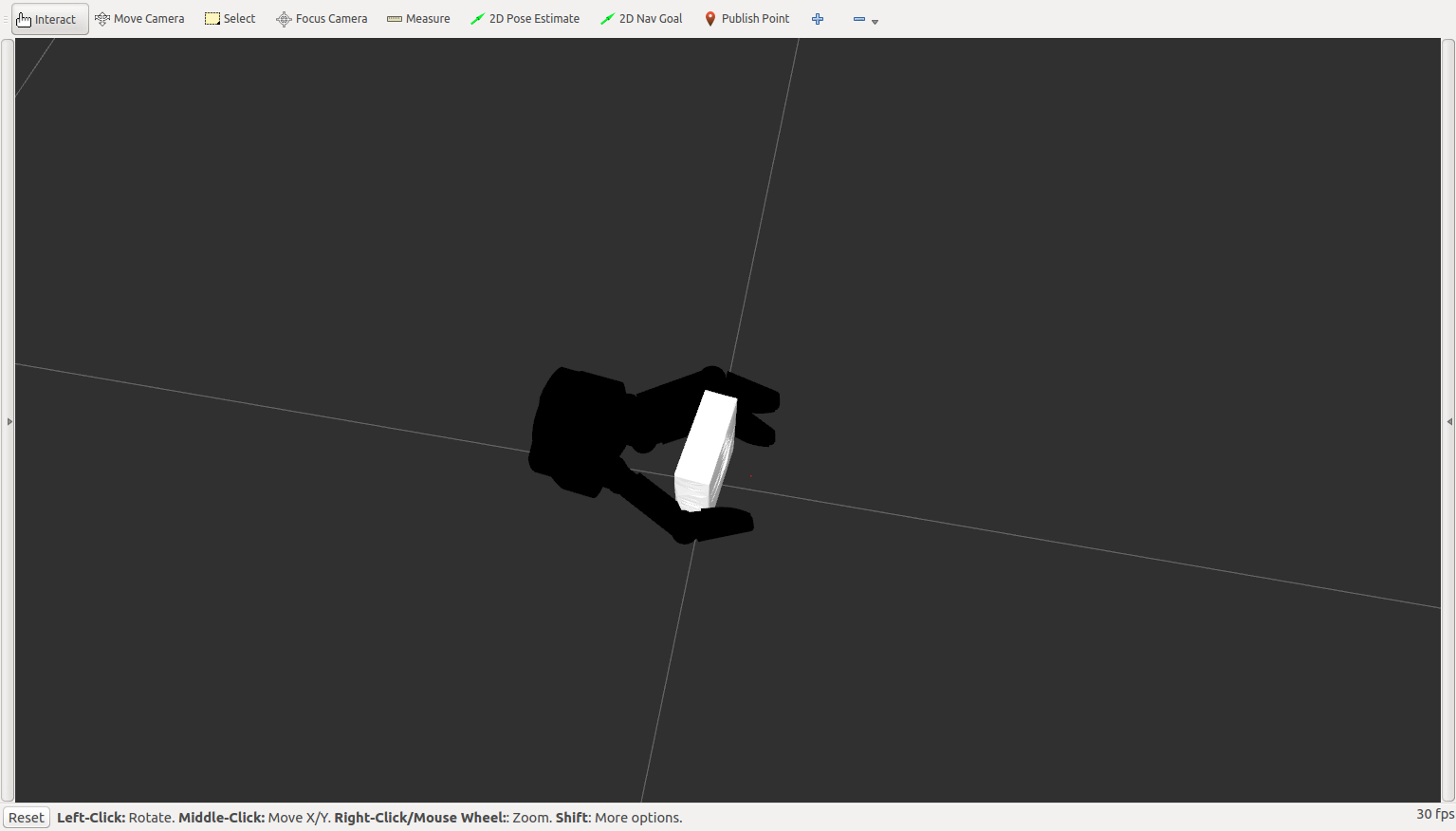
I fixed the handling of mimic joints and the quaternion normalization now you clearly see that the problem with grasping with the sdhx is the grasp_poses...this can easily be fixed by modifying the csv-files!
sdh grasptables look fine: By the way, you run the visualization like so:
|

|
Awesome, thanks for looking into this. I am looking forward to see this in operation by my student. |
| @@ -1,123 +0,0 @@ | |||
| #!/usr/bin/env python | |||
There was a problem hiding this comment.
Why did you remove this file? Was it obsolete?
There was a problem hiding this comment.
nothing is lost...i created separate nodes for each action...
37fca91 to
e7dd5ac
Compare
|
@ipa-rmb @ipa-rmb-pz did you do any further tests/enhancements with/ontopof this? @ipa-bfb @ipa-aep FYI |
|
Sorry for the delay. I have just seen the Email, because I only work at Thursday and Friday.
Until now i haven't tried to run it. because there was a Demo last month, so i needed to prepare for it. since this month i will begin to try it.
i have already learned something about 'Moveit!'.
have a wonderful day! ^_^
Zhiqiang
…________________________________
From: Felix Messmer [notifications@github.com]
Sent: Monday, September 04, 2017 3:10 PM
To: ipa320/cob_manipulation
Cc: Pu, Zhiqiang; Mention
Subject: Re: [ipa320/cob_manipulation] separate openrave independent part query_grasp (#126)
@ipa-rmb<https://github.com/ipa-rmb> @ipa-rmb-pz<https://github.com/ipa-rmb-pz> did you do any further tests/enhancements with/ontopof this?
what's the current status?
@ipa-bfb<https://github.com/ipa-bfb> @ipa-aep<https://github.com/ipa-aep> FYI
—
You are receiving this because you were mentioned.
Reply to this email directly, view it on GitHub<#126 (comment)>, or mute the thread<https://github.com/notifications/unsubscribe-auth/AclzydyQl1pzNyRPh4xqqpJA7abC4zoJks5se_begaJpZM4O0lix>.
|
part of #125
@ipa-rmb @ipa-rmb-pz FYI